اثر پیزو الکتریک
اثر فشاربرقی یا پیزوالکتریسیته (Piezoelectricity) در سال 1880 توسط دو برادر و دانشمند فرانسوی، «ژاک کوری» (Jacques Curie) و «پیر کوری» (Pierre Curie) کشف شد. آنها برای نخستین بار دریافتند که فشار وارد شده به کوارتز یا حتی برخی از بلورهای خاص باعث ایجاد بار الکتریکی در آن ماده خاص میشود. این پدیده عجیب و علمی بعدها به عنوان «اثر پیزوالکتریک» (Piezoelectric Effect) شناخته شد.
برادران کوری بلافاصله اثر پیزوالکتریک معکوس را نیز کشف کردند. آنها پی بردند که اِعمال میدان الکتریکی به سطوح بلور منجر به تغییر شکل و بینظمی سطح آن میشود. این پدیده که برعکس اثر پیزوالکتریک مستقیم است، اثر پیزوالکتریک معکوس نامیده میشود.
پیزوالکتریک از واژههای یونانیِ پیزو (Piezo) به معنای فشردن و الکتریک (Electric) به معنی کهربا یا برق (منبعی از بار الکتریکی) گرفته شده است.
اصول پایه پیزوموتور سرامیکی در حدود 100 سال است که شناخته شده، اما با این حال دهه ها طول کشید تا از یک ایده به یک محصول صنعتی قابل اطمینان تبدیل شود. درست همانند موتورهای الکترومغناطیس، انواع مختلفی از آن ایجاد و مورد آزمایش قرار گرفت. امروزه میتوان گفت که پیزوموتورها به عنوان عضو اصلی المانهای حرکتی در مصارف تجاری و صنعتی تبدیل گشتهاند. دلیل اینکه در مقایسه با موتورهای الکتریکی سنتی زمان بیشتری برای پیزوموتورها طول کشید تا بدین نقطه برسند را میتوان در دقت مورد نیاز قطعات مکانیکی و همچنین در پیچیدگی درایوهای الکترونیک جست که آن هم تنها با وفور تراشههای دیجیتال قدرتمند با قیمتهای منطقی ممکن شد.
همه پیزوموتورها حرکت را بر اساس تغییرشکلهای کوچک یک ماده پیزوسرامیک که توسط تغییر در میدان الکتریکی اعمالی به آن ایجاد شده است، تولید میکنند. تعدادی اصول خطی و دورانی بر اساس حرکات نوسانی فرکانس کم یا بالا وجود دارد. اساسا، پیزوموتورها را میتوان به سه دسته عمده تقسیمبندی کرد:
موتورهای رزونانس (درایورهای اولتراسونیک)،
درایوهای گام پیزو (piezo-walk).
موتورهای اینرسی (stick-slip principal)،
موتورهای اولتراسونیک
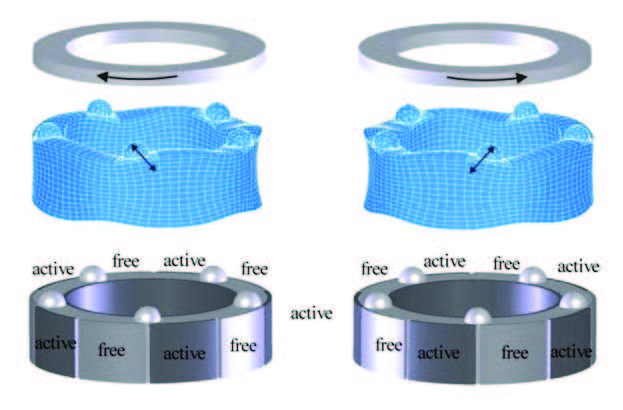
موتورهای اولتراسونیک حرکت را بر اساس رفتار رزونانس در یک عملگر پیزوسرامیک تولید میکنند. حرکت از عملگر به قطعهای که باید حرکت داده شود بصورت جزءهای نانومتری، اما با فرکانس بالا، منتقل میگردد که منجر به حرکت روان و پیوسته میشود.
دستگاههای موقعیتسنج دقیق بر پایه موتورهای اولتراسونیک میتوانند بسیار جمع و جور باشند و امکان رفتار step/settle بسیار سریع را فراهم کنند. سرعتهای خطی و دورانی بالا قابل دسترسی است.
- سرعت: زیاد، صدها میلیمتر بر ثانیه و درجه بر ثانیه
- نیروها: متوسط، 3 تا 20 نیوتن
- دقت: زیر میکرومتر تا نانومتر
- اندازه: فشرده
- خود قفلی، پایداری طولانی مدت عالی
موتورهای PiezoWalk
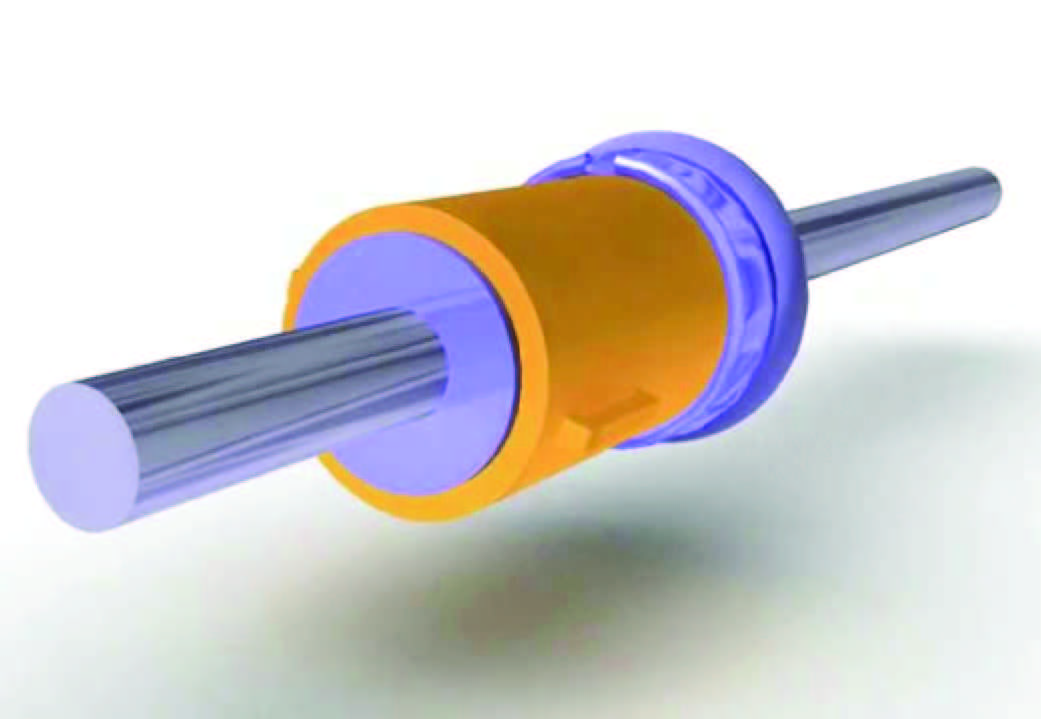
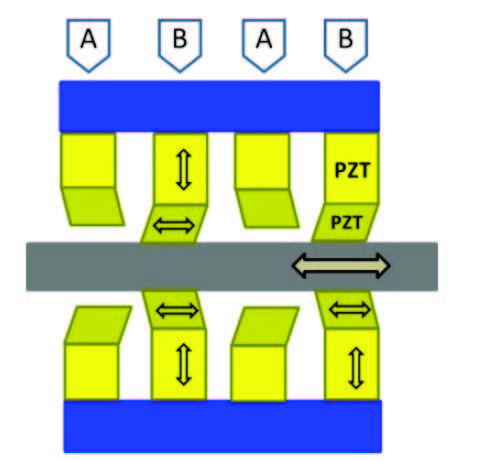
این موتورها با حرکت هماهنگ چندین عنصر پیزو (پا) که در جهات طولی و رفت و برگشت عمل میکنند، کار میکنند. این عناصر میتوانند برای حرکت خطی به یک میله و برای حرکت دورانی به یک دیسک فشرده شوند. در حال حاضر، مکانیزمهای موجود سفتی و نیروی نگهداری فوقالعادهای ارائه میدهند.
- سرعت: کم تا متوسط، 1 تا 60 میلیمتر بر ثانیه و 360 تا 1000 درجه بر ثانیه
- نیروها: متوسط تا بسیار زیاد، 10 نیوتن تا 600 نیوتن
- دقت: نانومتر تا پیکومتر
- اندازه: فشرده تا متوسط
- خود قفلی، پایداری طولانی مدت عالی
این موتورها از اثر stick-slip، یک تناوب سیکلی از اصطکاک استاتیک و لغزشی، استفاده میکنند. این موتورها در انواع مختلفی وجود دارند: درایوهای خطی (درایو مستقیم)، درایوهای مستقیم مماسی (خطی و دورانی)، و درایوهای پیچی نوع جغجغهای. این موتورها دقت بالا و پایداری طولانی مدت عالی با قابلیتهای خود قفلی ارائه میدهند. اصول حرکت آن بر پایه یک سیگنال شبه دنده ارهای با فاز انبساط آرام و فاز فشردگی سریع میباشد. زمانی که عنصر پیزو به بیشینه انبساط خود میرسد، یک فاز فشردگی بسیار کوتاهتر به دنبال آن میآید، سریعتر از آن که مکانیزم متحرک بتواند آن را به دلیل اینرسی خود دنبال کند.
- سرعت: کم تا متوسط، تا 10 میلیمتر بر ثانیه و 10 تا 70 درجه بر ثانیه
- نیروها: کم، 1 تا 20 نیوتن
- دقت: نانومتر
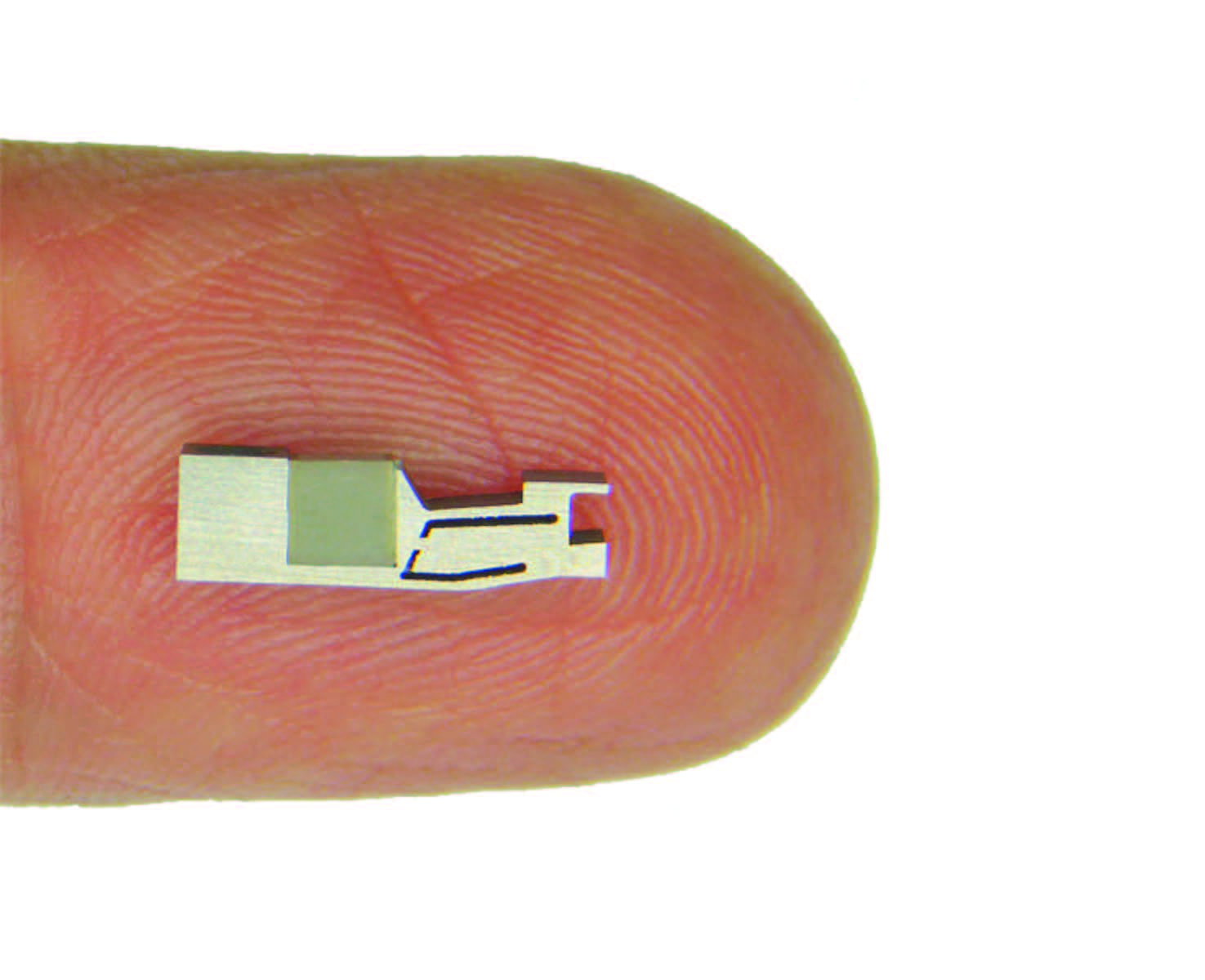
- اندازه: مینیاتوری
- خود قفلی، پایداری طولانی مدت عالی